Archived Projects
Summary
2017-19 | ArdSimX Interface
2015-17 | ArdSim Library
2014-15 | ARDref Interface
2013-14 | XPData library
2012-13 | Baron 58 program
2011-12 | First Tests with UDP
CLOSED (in 2017) project, not updated. Next ArdSimX has fully replaced it.
The latest SimVimX System is recommended if you are going to start your cockpit project.
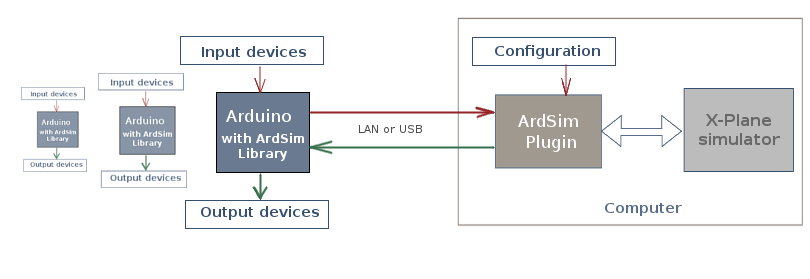
ArdSim interface consists the plugin and custom library for Arduino and requires minimum coding. Any pin configured as input control linking it with specific X-Plane command or dataref to send data, or for use it as output getting dataref values through ArdSim plugin. To configure ArdSim input controls for X-Plane or get data from X-Plane for outputs ArdSim library has a set of convenient functions that you can use in Arduino code to setup input controls and assign specific action (switch, encoder, LED etc.) for any Arduino pin.
Next ArdSimX Interface doesn't include any functions that need to be used in Arduino code - all inputs/outputs are assigned using the online Configurator only!
The functions described on this page are related to ArdSim library ONLY.
Next ArdSimX Interface didn't require any custom I/O functions.
The latest current SimVimX System is recommended if you are going to start your cockpit project.
ArdSim library includes functions (below) that let you easily configure your output devices for a specific dataref value output. You can link any dataref value with a specific LED, servo, analog gauge, simple stepper (later more devices will be supported). In these cases you don't need to read dataref values in your code to control such output devices.
Otherwise, if you need to get a dataref value for use in your specific program code or send it to some output device not included in the library, you can use the library functions "GetData()" together with "NewData()" with the dataref number from the out_#.cfg output list as argument.
The latest SimVimX System is recommended if you are going to start your cockpit project, it doesn't need Arduino programming.
ArdSim plugin transmits any command or dataref value assigned in the config file to X-Plane in response to activity of the input device (button , switch, encoder, analog input change).
But sometimes you would need to send command or dataref value based on the result of your custom code, not in response to input device action.
Using the function "SimInput" you can send the ID number for a specific command/dataref from your code to X-Plane.
You can use these two functions only if you need to extend your Arduino inputs or you don't want to add more Arduino boards to your system. To increase the number of digital inputs for buttons and switches use the "InputMatrix" function. Use less Arduino pins for more rotary encoders with "EncoderPort" function:
InputMatrix ( X1, X2, Y1, Y2); |
Initial configuration function for the key matrix. Place in the "setup()" section. Use only if you have key matrix input. |
|
X1 - First row pin number X2 - Last row pin number Y1 - First column pin number Y2 - Last column pin number |
For example: InputMatrix ( 22, 29, 30, 36); - the 48-input matrix (8x6) is using 8 pins for rows (22-29) and 6 pins for columns (30-35) Each input can act as a simple momentary button with "on-push" or "on-release" reaction or as toggle switch . To add repeating-on-hold function to specific input (button), use the function "RepeatBtn ()" |
EncoderPort (PIN); |
Initial configuration function for encoders input port. (place in the "setup()" section). Used with following "EncoderPin" function. |
PIN - encoders input port first pin number |
This function reserves three Arduino pins for encoders input - PIN, PIN+1, PIN+2 |
| EncoderPort ( 6 ); | Example - Encoders port assigned on pins #6, 7 and 8. |
Since all digital Arduino pins that are not used in key-matrix, encoder port and ArdSim library output functions are auto-assigned as INPUTS for buttons/switches, you can not use them for output. With this function you can reserve any pin or pin range for OUTPUT to use in your custom code for output devices.
OutputPin ( Pin, Pin1 ); | Set pin to OUTPUT mode if you need it to be reserved for your output devices. Should be placed in the "setup()" section |
| OutputPin ( 6 ); | - Reserve one Pin #6 for OUTPUT (it will not be used in the library input functions and will not be scanned as input) |
| OutputPin ( 6, 9 ); | - Reserve pins #6...9 for OUTPUT (this pin range will not be used by the library and will not be scanned as inputs) |
As default, all digital Arduino pins that are not used in key-matrix, encoder port and ArdSim library output functions are auto-assigned as INPUTS for buttons/switches. If you don't need to use any or all of the free Arduino pins as inputs use this function to assign only specific pins or pin range for INPUT to exclude excessive program inputs scan.
InputPin ( Pin, Pin1 ); | Set pin to INPUT mode. Should be placed in the "setup()" section |
| InputPin ( NOINPUT ); | - NO any free pins will be scanned as inputs (excluding thouse assigned as Encoders or Matrix inputs) |
| InputPin ( 22 ); | - Assign one Pin #6 for INPUT (it will be used in the library input functions and scanned as button/switch input) |
| InputPin ( 33, 45); | - Assign pins #33..45 for INPUT (this pin range will be scanned as inputs) |
These functions should be used for initial inputs configuraton and placed in the "setup" section of Arduino program.
Since version 2.1 of ArdSim library the encoder functions provide non-linear increment value for datarefs depending on the encoder rotation speed. For example, when a dataref value increments by one unit for each encoder step on low rotation speed, then on higher encoder rotation speed this increment will multiply for each step by a factor depending on the speed and ensures that you will always add the minimum increment on one step when you rotate encoder step by step and independed on encoder type
EncoderPin ( PIN, BM ) |
Assign input Pin numbers (2-3pins) for direct Encoder connection or one output pin number if encoder port is used and internal button mode (Location - in the "setup()" section) |
|
PIN - pin number BM - encoder internal button mode |
- first of a 2...3-pin number for direct connection OR one output pin number for "port" connection. - mode for the inbuilt encoder button ( 0, 1, 2-8 ) |
| EncoderPin ( 22, 4 ); | For direct encoder connection, buttons with 4 modes. Input pins used: #22, 23, 24 |
| EncoderPin ( 22, 4 ); | For "port" encoder connection - buttons with 4 modes. One Output pin used: #22 |
| EncoderPin ( 5 ); | Encoder with no button. Input pins used: #5, 6 if direct input used, or pin #5 if encoder port is used |
EncMode ( Enc ) |
This function returns current mode of chosen encoder. | EncMode ( 4 ); |
| EncMode (4); |
// -- Read current mode of encoder #4 |
|
| Note: The function "EncMode" returns value>0 only when the mode has been changed, otherwise it returns "0". I.e., you can check first if the EncMode(n) is not "0" to execute your code only upon encoder's mode change. | ||
| For Mode indication use the EncModeLED function - (below on this page) |
To configure analog inputs as axis control only one function is used, that is located in the setup section and includes all needed parameters - analog pin number, sensitivity, and optional input value range.
AnalogIn ( pin, pre, min, max); |
Configuration function for the analog input. Located in the "setup()" section You can use this function as common analog inputs with potentiometers, such as flight controls, and as emulation of multi-position levers using potentiometers. |
|
pin - Arduino analog pin number pre - precision 2-1000 min - min. potentiometer value max - max. potentiometer value |
Arduino analog pin number from 0 to 16 for Mega Precision, or number of steps, 2-1000 (1000 - maximum sensitivity, 2 - two-position lever) (Optional, default=0) - min. potentiometer value, if you have to use the pot with partial stroke range (Optional, default=1023) - max. potentiometer value, if you have to use the pot with partial stroke range |
|
AnalogInput ( 1, 200 ); AnalogInput ( 5, 2 ); AnalogInput ( 0, 3 ); AnalogInput ( 0, 3, 0, 300 ); |
- A simple analog input with the precision of 200 steps for a full-stroke potentiometer (from 0 to 1023) - A simple 2-position "switch" with potentiometer - A 3-position lever (as flaps lever) with potentiometer - A 3-position lever for a partial-stroke potentiometer (flaps) |
With this function you can configure analog pin as input for multi-position switch, setting the number of fixed position for it. To assign control dataref or command to each rotary switch position you should use A0/1, A0/2 etc. IDs in your config file.
AnalogSwitch ( pin, step, mode); |
Configuration function for the analog input that is used for multi-position switch, see Analog input as digital. Located in the "setup()" section |
|
pin - Arduino analog pin number step - number of positions mode - repeat mode (for one position) |
Arduino analog pin number from 0 to 16 for Mega Number of positions for the rotary switch, (Optional, default=0) - use this as a number of the position that is used for repeated command |
|
AnalogSwitch ( 2, 6 );
AnalogSwitch ( 0, 5, 5 ); |
- A 6-position rotary switch for analog pin A2
- A 5-position (magneto) rotary switch on pin A0, the 5-th position used for repeated ignition command |
This is a button that cyclically switches between several modes for some custom actions. This button can be connected either directly to any free Arduino pin or to a matrix input. Place this function anywhere in your main loop code for the pin used as counter mode button.
Description is hereAlong with the encoders built-in button you can use any other input as external button for switching between various modes of the encoder. This button can be connected either directly to any free Arduino pin or to a matrix input. Place this function anywhere in your main loop code for each pin used as mode button. Note: Don't place this function in the "setup" section
EncModeBtn ( IN, Enc, "Mod", MX ) |
Button sets mode ("ModD") for chosen encoder when clicked. "MX" - is the keyword for matrix button (if button is connected to the matrix node). Description is here: Input Modes |
|
IN - Arduino pin number (or node) EN - encoder number 'M' - mode name (unique symbol) "MX" - keyword for matrix button |
- Pin number (button on the pin - D# ) or matrix node number (button is connected to this node - B# ) - number of the affected encoder (starting from 1) - mode name should consist of one letter of alphabet except numbers ( numbers 1-8 are used for built-in encoder button mode). I.e. use symbols 'A', 'a', 'B', ...'W', 'Z', etc. |
EncModeBtn ( 5, 3, 'A' ) // - Button on pin #5 sets mode "A' for encoder #3 EncModeBtn ( 6, 3, 'H' ) // - Button on pin #6 sets mode "H' for encoder #3 EncModeBtn ( 7, 3, 'V' ) // - Button on pin #7 sets mode "V' for encoder #3 EncModeBtn ( 8, 3, 'N' ) // - Button on pin #8 sets mode "N' for encoder #3 |
|
|
EncModeBtn ( 3, 5, 'R', MX ) // - Button on matrix in #3 sets mode "R' for encoder #5 EncModeBtn ( 60, 5, 'W' ) // - Button on matrix in #60 sets mode "W' for encoder #5 ( MX can be omited if the matrix node number is more than last number of Arduini pins) |
|
|
For Mode indication use the EncModeLED function - (below on this page)
To read current mode use the EncMode function - (above on this page) |
ReadInput ( IN, Act, MX ) |
Read an input current static state (On/Off) or dynamic state changes. This function returns "1" or "0" as a result of its static or dinamic state reading. You can use this result in your custom code. |
| in = ReadInput ( 5 );
// -- returns "1" if pin #5 is in "ON" state or "0" if pin state is "Off". The result is placed in the variable "in".
in = ReadInput ( 13, MX ); // -- the same as above, but for matrix input #13... in = ReadInput ( 8, ON ); // -- returns "1" if the pin #8 state was changed from Off to On in the current program loop, "0" if not in = ReadInput ( 22, OFF ); // -- returns "1" if the pin #22 state was changed from On to Off in the current program loop, "0" if not in = ReadInput ( 6, OFF, MX ); // -- returns "1" if the matrix iput #6 state was changed from On to Off in the current program loop in = ReadInput ( 66, ON ); // -- returns "1" if the matrix iput #66 state was changed from Off to On in the current program loop |
|
| MX keyword can be omited if the matrix node number is more than last number of Arduino pins ( e.g. for MEGA > 53, for UNO >13 etc.) | |
SimInput (ID); | Direct input - send to X-Plane ID for specific command/dataref from your code. |
| SimInput ( 33 ); | The corresponding line in the input config file: C33 sim/radios/nav1_standy_flip |
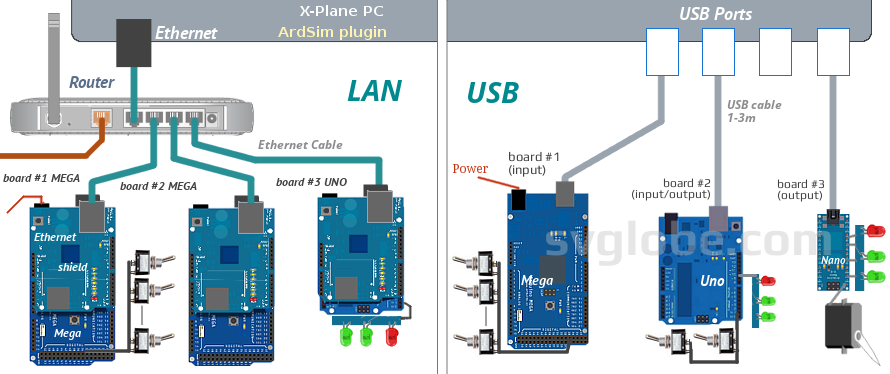
All major functions are the same for the LAN and USB connection but the LAN version has some additional functions for sending datarefs, commands, menu items and keyboard symbols directly to X-Plane by UDP, without configuring these actions in the input config file (beside plugin).
These basic functions that you can use for your custom code - send commands without using the output config file!
XPDref ( DRef, Val ) | Send dataref and its value to X-Plane | XPDref ( "cockpit2/controls/flap_ratio", 1 ); // Flaps Full position |
XPCmnd ( Com ) | Send command to X-Plane. | XPCmnd ( "ice/pitot_heat0_on" ); // Pitot heat switch
XPCmnd ( "v" ); // Toggle parking brake (keyboard emulation) |
XPMenu ( MenuNum ) | Open X-Plane menu item. | XPMenu ( 1800 ); // Send decimal menu number (1800 = view forward) |
You don't need get data from X-Plane to control some outputs. ArdSim library includes functions that let you easily configure your output devices for a specific dataref value output. You can assign which dataref will be "linked" with a specific LED, servo, analog gauge etc.
Otherwise, if you need to get a specific dataref value for further output using your specific program code you can call the "GetData()" function of the library with just one argument - the number of the parameter in the out_#.cfg output list
LEDout ( NAME )LEDout ( P, D, V, M, I ) |
Control the LED output with specific dataref. You can use this function with one argument that is previously defined constant "NAME" ( it is preferable), or use all 2-5 arguments directly without defining the named constant | LEDout ( Pitot ); LEDout ( Flaps) LEDout (8, 5, 0.5) LEDout (10, 6, 0.4, 0,8, 1) |
When defining the constant "NAME" in the beginning of the code you should assign at least two elements - the pin number for this LED output (P) and the dataref number (D). Next optional elements is the value of dataref on wich the LED should light up (V), another value of dataref for the value range (M). Last optional element "I" used to set inversion. Default V = 1, it means the LED is on when value =1. #define NAME P, D, V, M, I |
||
|
#define Pitot 10, 5 #define PitotHeat 10, 5, 0 #define Flaps1 11, 6, 0.5 #define Flaps2 12, 6, 0.4, 0.7 #define Flaps3 13, 6, 0.4, 0.7, 1 |
- Define Pitot LED connected to pin #10 and controlled by dataref #5 - The same as above but inverted output - the LED is on when value of dataref is 0 - Flaps LED on the pin #11, dataref #6, controlling dataref value = 0.5 - Flaps LED on the pin #12, dataref #6, controlling dataref range is 0.4-0.7 - Flaps LED on the pin #13, dataref #6, controlling dataref range is 0.4-0.7, inverted |
|
|
LEDout ( Pitot )
LEDout ( Flaps1 ) LEDout ( Flaps2 ) LEDout ( Flaps3 ) |
// - Pitot LED on the pin #10, dataref #5. LED is on when value of dataref is 1
// - LED is ON only when flaps position = 0.5 ( useful for mutiple LEDs for one data range ) // - LED is ON when dataref value is in 0.4-0,7 range // - LED is ON when dataref value is outside of 0.4-0,7 range |
|
LEDout ( Pin, State ) |
Direct control of the LED. You can use this function if you need control the LED from your code | LEDout ( 13, ON ); LEDout ( 12, OFF) |
|
if (your_condition==1) LEDout (13, ON); if (your_condition==0) LEDout (13, OFF); |
// -- Turn the LED on the pin #13 ON if your condition is 1 // -- Turn the LED on the pin #13 OFF if your condition is 0 |
|
EncModeLED ( Pin, Enc, Mode ) |
LED will be turning on or off, according to encoder mode. | EncModeLED ( 13, 1, 4 ); |
|
EncModeLED (13, 1, 2); EncModeLED (5, 4, 'D'); |
// -- Turn the LED (pin #13) ON if encoder#1 mode = 2 // -- Turn the LED (pin #5) OFF if encoder#4 mode = 'D' |
|
servoGauge ( Dref, ServoName ) |
Assign which dataref (number "Dref") will be "linked" with a specific predefined servo ("ServoName"). | servoGauge ( 6, Flaps ); |
|
The first argument (Dref) is the dataref number which is assigned for this dataref in the "out_1.cfg" file: The second argument in this function ("ServoName") is the name of the preliminary defined construction in the beginning of your Arduino code. For example define the "Flaps" servo with control pulse range of 600-2200 mcsec connected to the pin #40, and dataref value range to control this servo 0.00 to 1.00 : #define Flaps 40, 0, 1, 600, 2200 .. where after the defined name ( Flaps ) you have to write five numbers: 1) Number of the Arduino Pin to which this servo is connected (pin #40 here) 2) Minimum value for the given dataref (0.00) 3) Maximum value for the given dataref (1.00) 4) The microseconds number which corresponds to the minimum value of dataref (560 here) 4) The microseconds number which corresponds to the maximum value of dataref (2100 here) How to define the range of your particular servo: Servo control |
||
|
Then place the servoGauge function for this example in the main code loop: servoGauge ( 6, Flaps ) |
||
Gauge ( Dref, GaugeName ) |
Assign which dataref (number "Dref") will be "linked" with a specific predefined servo ("GaugeName"). | Gauge ( 6, Flaps ); |
|
The first argument (Dref) is the dataref number which is assigned for this dataref in the "out_1.cfg" file: The second argument in this function ("ServoName") is the name of the preliminary defined construction in the beginning of your Arduino code. For example define the "Flaps" servo with dataref value range to control this servo 0.00 to 1.00 : #define Flaps 5, 0, 1 .. where after the defined name ( Flaps ) you have to write 3 numbers: 1) Number of the Arduino Pin to which this servo is connected (pin #5 here) 2) Minimum value for the given dataref (0.00) 3) Maximum value for the given dataref (1.00) |
||
|
Then place the Gauge function for this example in the main code loop: Gauge ( 6, Flaps ) |
||
| Library Versions | Features, updates | Plugin versions supported |
|---|---|---|
| ArdSim Interface 5.1 | Reduced memory usage for smaller boards (such as Nano) allowing them to work correctly with ENC28J60 module. Fixed the static reading mode of ReadInput() function. | ArdSim Plugin 2.7 |
| ArdSim Interface 5.0 | #include ArdSim.h is replaced by #include ArdSim_Interface.h | ArdSim Plugin 2.7 |
| ArdSim Interface 4.9 | Added support of "Counter Button" for any pins number. You can assign as many Counter buttons as you need | ArdSim Plugin 2.7 |
| ArdSim Interface 4.8 | Corrected the problem with USB data receiving (LAN is OK) when several parameters change simultaneously and some changes were not detected. - ( 25 Nov correct version .8, not earlier) | ArdSim Plugin 2.7 |
| ArdSim Interface 4.7 | Issues with custom OutputPin() assignment and Encoder Inputs being mixed with Digital Inputs corrected | ArdSim Plugin 2.7 |
| ArdSim Interface 4.6 | Programmed Input ("SimInput" ) corrected | ArdSim Plugin 2.7 |
| ArdSim Interface 4.5 | Counter button function changed (see here) | ArdSim Plugin 2.7 |
| ArdSim Interface 4.4 | v4.3 had servo output problem, corrected in v4.4) | ArdSim Plugin 2.7 |
| ArdSim 4.0-4.3 | First releases of universal LAN/USB (all in one) version of "ArdSim Inteface" | ArdSim Plugin 2.7 |
ArdSim library v4.xx is the same as v3.xx concerning its functionality. The main difference in ArdSim Library v4.xx is that it's now a single, universal library for LAN and USB communication (previous 3.xx versions had two separate libraries for LAN and USB). |
||
| ArdSim LAN v 3.5 ArdSim USB v 3.5 |
---- | ArdSim Plugin 2.6 |
| v3.4 | ---- | ArdSim Plugin 2.0...2.6 |
| v3.3 | ---- | ArdSim Plugin 2.0...2.6 |
| v3.2 | ArdSim Plugin 2.0...2.3 | |
| v2.8c | ArdSim Plugin 2.0...2.3 | |
| v2.7 | ArdSim Plugin 2.0...2.3 | |
| v2.6 | ArdSim Plugin 2.0...2.2 | |
| v 2.5b | initial setup in the Arduino code of ArdSim (LAN) has been changed to simplify it. Added option of defining the IP adresses for both X-Plane PC and Arduino board (if you have problem with auto-connection), in ver 2.5 you have to enter full IP address for Arduino (not only the last number) | ArdSim Plugin 2.0... |
| v2.4 | Some pairs of functions for matrix and direct input have been replaced by one function. All previous pairs of functions can still be used. | ArdSim Plugin 2.0... |
| v2.3 | Since all digital Arduino pins that are not used in key-matrix, encoder port and ArdSim library output functions are auto-assigned as INPUTS for buttons/switches, you couldn't use them for output. With added "OutputPin" function you can reserve now any pin for OUTPUT to use in your custom code for custom output devices. | ArdSim Plugin 2.0, 2.2 |
| v2.2 Oct 06, 2015 | Encoder functions has been changed to provide non-linear increment value for datarefs depending on the encoder rotation speed. The increment multiplies for each step by a factor depending on the rotation speed and ensures that you will always add the minimum increment on one step when you rotate encoder step by step. Now it's independed on encoder type, the encoder function does not include this argument. | ArdSim Plugin 2.0, 2.2 |
| v2.0 Sept 10, 2015 | Added support for USB connection (ArdSimUSB version of the library). Most of functions were revised, some was removed or replaced. Function names became more relevant. Direct connection for encoders has been added, you can can choose one connection option for encoders - direct or matrix. NOT compatible with ver. 1.xx! | ArdSim Plugin 1.3...2.2 |
| v1.2 Aug 8, 2015 | Functionality of the "PinState" function has been changed, function "InState" was removed. Function "InputAction" has been added, that replaced both "InState" and previous "PinState". Direct LED control function has been added. | ArdSim Plugin 1.0...1.2 |
| v1.1 July 20, 2015 | major errors in matrix inputs and other small bugs were corrected, July 24 - corections for X-Plane 9.xx in ArdSim plugin) Config files now support multiple spaces/tabs as separators for comments. "Reload Plugins" menu item added in the plugin. | ArdSim Plugin 1.0...1.2 |
| v1.0 July 10, 2015 | BETA, range test sketches fo servo added, July 16 - small corrections, July 17 - some examples added. | ArdSim Plugin 1.0...1.2 |
| Plugin Versions | Features, updates | Library versions supported | Lin | Win | Mac |
|---|---|---|---|---|---|
| Plugin v 2.7 | All communication ports now open only after the simulator has finished loading, preventing startup crashes | 4.0 and newer | *** | *** | ** |
| Plugin v 2.6 | "Continuous" mode also works for analog inputs | 2.5 ... 3.5 | *** | *** | ** |
| Plugin v 2.5a | Analog inputs can now be inverted if you switch the min/max values in the configuration. | 2.5 ... 3.5 | *** | *** | ** |
| Plugin v 2.5 | Repeat-buttons are now handled by the plugin, instead of the library. In the input config, indices ending in "++" (i.e. "D12++") are repeat-buttons. | *** | *** | ** | |
| Plugin v 2.4a | Fixed a crash from v2.4 when connecting to an Arduino without an input config file present for this Arduino number. | *** | *** | ** | |
| Plugin v 2.4 | Some specific simulator commands are now always marked by the plugin as "continuous", because it's the only way X-Plane handles them. This eliminates the need to assign "continuous" buttons for these commands in Arduino. | *** | *** | ** | |
| Plugin v 2.3b | - For Mac: added support for USB port names starting with "tty.wchusb". | *** | *** | ** | |
| Plugin v 2.3 | - Fixed a rare case of input data sometimes being processed incorrectly. | *** | *** | ** | |
| Plugin v 2.2a | - For Mac: fixed a problem with USB connections when finishing scanning for devices. - For Windows: now scans COM ports from COM1 to COM64 (previously was only up to COM8). | *** | *** | ** | |
| Plugin v 2.2 | - Fixed problems of v2.x with both LAN and USB connections on Windows (tested on Windows 10). - Several stability tweaks for all systems. | *** | ** | ** | |
| Plugin v 2.1 | Plugin's "About" window changed to "Status". Added a checkbox to enable/disable USB communication (useful to avoid problems with uploading code to Arduino while ArdSim is running). The state is saved in the config.ini file. | *** | * | ** | |
| Plugin v 2.0a | For Mac: fixed USB port names the plugin is searching for. | *** | ** | ** | |
| Plugin v 2.0 | - Added support for USB connections. Both USB and LAN Arduino connections are supported at the same time, up to 10 connected devices total. Connection is automatic. You may need to have drivers from Arduino IDE installed there.
- Instead of a device limit set in the main configuration, a timeout is now used to stop searching for new devices. The timeout starts after at least 1 device is connected. The plugin is searching for new devices while the "About" window displays "scanning..." in it. If you want to connect new devices after some time, use "Reconnect" option. You should always use this option after connecting new devices by USB if the simulator is already running. - Changed the way loading a new plane, airport, or changing position on the Local Map is handled. All input states are resyncronized without resetting connection, avoiding any delay in controls. - Fixed possible issues with finding config files on different systems. - Fixed a bug with analog inputs used as rotary switches not working properly with DataRefs. - Changed the plugin's "About" window to list all connected devices. |
*** | ** | ** | |
| Plugin v 1.3 | (updated v1.2 after release of v2.1, can be used with library 2.5)
- Fixed crashes if your router is configured to support a broadcast address. - Fixed a bug that in rare cases could freeze the inputs for a couple of seconds. |
*** | *** | *** | |
| Plugin v 1.2 | Plugin resets when loading a new plane or airport, in order to receive all new input data.
Input DataRefs without a value specified in the config now have the default value of 1. Plugin no longer crashes if the value is missing. Changed file path detection. The plugin folder name no longer matters. |
*** | ** | ** | |
| Plugin v 1.1 | Config files support multiple spaces/tabs as separators. | *** | ** | ** | |
| Plugin v 1.0 | *** | ** | ** |